
自控中的一些概念
自控中的一些概念【持续更新】
阻尼值对应的响应
一个系统受初扰动后不再受外界激励,因受到阻力造成能量损失而位移峰值渐减的振动称为阻尼振动。系统的状态由阻尼比ζ来划分。不同系统中ζ的计算式不同,但意义一样。把ζ=0的情况称为无阻尼,即周期运动;把0<ζ<1的情况称为欠阻尼;把ζ>1的情况称为过阻尼;把ζ=1的情况称为临界阻尼,即阻尼的大小刚好使系统作非“周期”运动。 理想状态下,与欠阻尼况和过阻尼相比,在临界阻尼情况下,系统从运动趋近平衡所需的时间最短。

传递函数
传递函数描述只适用于线性定常系统
传递函数G(s)的拉氏反变换是脉冲响应g(t)。脉冲响应(也称脉冲过渡函数)是
系统在单位脉冲δ(t)瑜入时的输出响应,此时R(s)=L[δ(t)]=1.
三频段理论
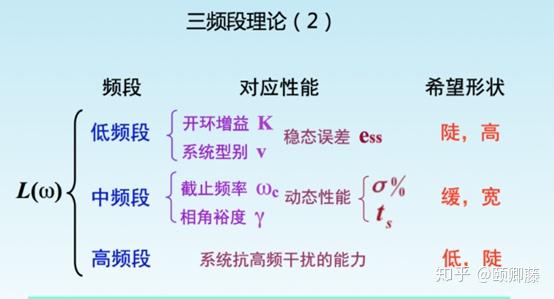
- 三频段理论有:低频、中频和高频段。
- 低频段主要对应系统的稳态精度和响应速度(开环增益K,系统型别v);
- 中频段主要反映了系统的稳定性和动态性能(中频段对应了系统的幅值剪切频率和相频剪切频率,这分别对应了系统的幅值裕度h与相角裕度γ,同时相角裕度与剪切频率也决定了系统(尤其是高阶系统)的调节时间、峰值时间和超调量等参数,这反映了系统的动态性能;且中频段斜率最好是-20dB/dec
- 高频段主要体现了系统的抗噪声能力,高频段的分贝斜率越大则抗噪声能力越好(高频噪声的幅值衰减越快)。
注解:
虽然对二阶系统而言,ts公式中仅与无阻尼自然震荡频率Wn有关,但是对高阶系统而言ts公式中与Wc截止频率成反比,因此中频段可看出系统的快速性,且相角裕度与高阶系统的谐振峰值Mr和超调量均成反比! (高阶公式在胡寿松书P253)PID和滤波器的关系
P 比例 I 积分 D 微分
高通滤波器,又称低截止滤波器、低阻滤波器,允许高于某一截频的频率通过,而大大衰减较低频率的一种滤波器 。它去掉了信号中不必要的低频成分或者说去掉了低频干扰。
有源高通滤波器:由无源元件(一般用R和C)和有源器件(如集成运算放大器)组成。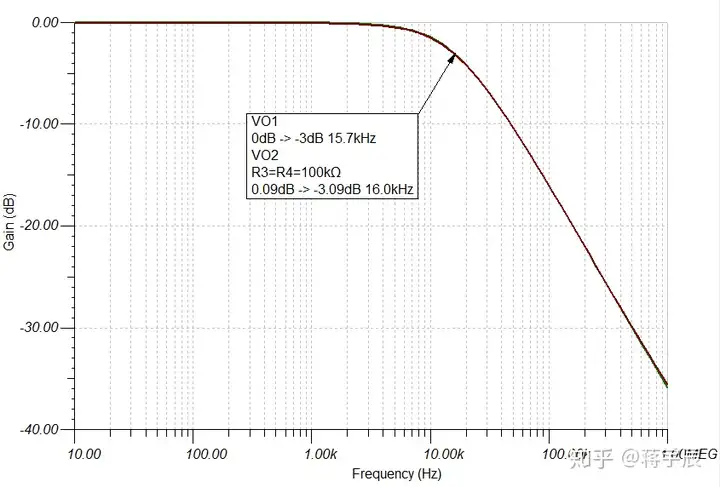
可知低通滤波器相当于比例积分 高通滤波器相当于比例微分
状态反馈未必能保持能观性,输出反馈可同时保持能观性



Invitation
hgez6
666666
created:14/10/2022
Big Bird Luck Card
Be happy .
This is luck card,wish you a nice day .
评论
